G9SX-GS/A4EG

переключающий модуль для защитных ограждений
Контроллер безопасности для реализации безопасного режима технического обслуживания и безопасного режима нормальной работы.
- два режима работы: автоматическое переключение в системах с одновременной работой машины и персонала и ручное переключение в системах с ограниченной работой, например, во время технического обслуживания
- наглядная светодиодная диагностика всех входов и выходов
- применимость для систем вплоть до категории 3 по EN 954-1
Ordering information
Enabling grip switches
Safety guard switching units
| Safety outputs 1 | Auxiliary outputs 2 | Max. OFF | ||||||
|---|---|---|---|---|---|---|---|---|
| OFF-delayed 4 | ||||||||
Specifications
Ratings of guard switching unit
Power input
Inputs
| Operating voltage: 20.4 VDC to 26.4 VDC, internal impedance: approx. 2.8 kΩ | |
Outputs
Application example
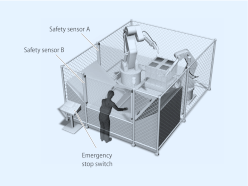
Automatic switching mode
Worker is loading and unloading the machine manually. When loading is finished, robot cycle is started manually by the worker. When robots return to their home position, loading cycle is selected automatically.
Loading condition: Safety sensor B is not active, safety sensor A is active because the robots are not allowed to move to the loading area while the worker loads the machine. So the worker is safe because safety sensor A is active.
Robot work condition: Safety sensor B is active, safety sensor A is not active because the worker is not allowed to move to the loading area when the robots work. So the worker is safe because safety sensor B stops the machine if he moves to the loading area.
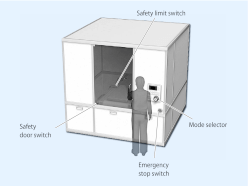
Manual switching mode
Worker has to do maintenance in this machine. While maintenance, it is necessary to move the machine in a limited way. The worker has to select automatic mode or manual mode manually by using the mode selector switch.
Operation steps:
1) Select maintenance mode by using the mode selector
2) Open the door to do the maintenance while the machine still is able to operate in a limited way (monitoring of limited movement by using the safety limit switch).
3) Close the cover after finishing maintenance
4) Select automatic mode by using the mode selector
E-Stop conditions:
a) open the door while not in maintenance mode
b) the machine actuates the limit switch (breaks the limit).
c) the Enabling grip switch A4EG is actuated to stop the machine in emergency condition.